


.
.

| Points Clés | |
|---|---|
| Référence du produit | RadioLink SUI04 SU04 |
| Technologie | Macar |
| Fonctionnalités | Évitement d’obstacles autonome pour PIXHAWK, mini contrôleur de vol PIX |
Description
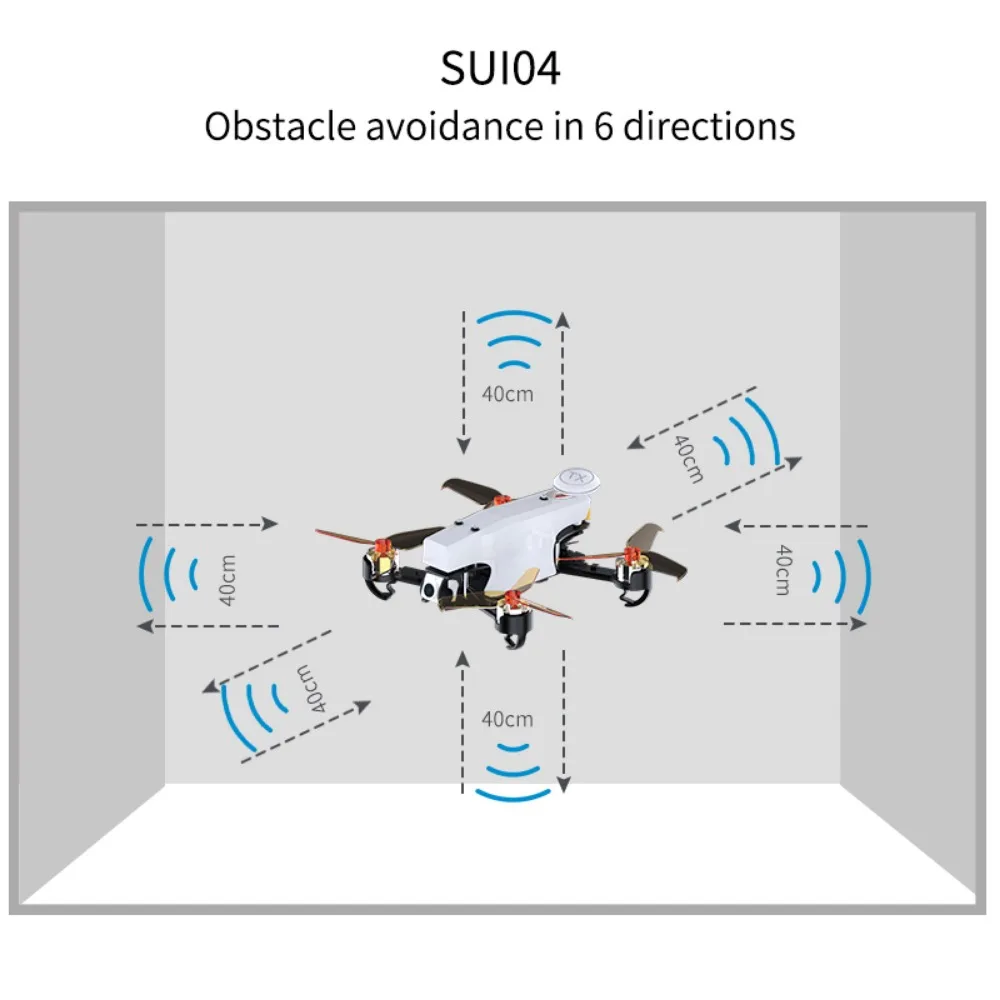
Le capteur de importateur à ultrasons RadioLink SUI04 SU04 est un module ultrasonique super mini pour Drone. Malgré sa petite taille, il offre d’excellentes performances. Cette nouvelle version améliorée de SU04 offre un angle de faisceau d’évitement d’obstacle de 60 degrés, comparé à l’angle original de 30 degrés.
Caractéristiques
- Module à ultrasons hybride de transmission et de réception
- Évitement d’obstacles autonome dans 6 directions horizontales
- Haute précision de détection de 0.4cm
- Technologie de filtrage double pour une réponse rapide de 30ms
- Angle de faisceau plus grand de 60 degrés pour un évitement d’obstacles complet
- Convient à de multiples scénarios d’utilisation
Spécifications du capteur d’obstacle
- Taille: 20*22*19mm
- Poids: 8g (y compris les fils)
- Tension d’entrée: 4.5 ~ 5.5V
- Courant: 18mA @ 5v
- Plage de détection: 40cm ~ 450cm
- Précision de détection: 0.4cm
- Sortie: I2C(SU04), I2C, UART
Ce que pensent les clients du produit
Aucun avis de client n’est disponible pour le moment.
Avis de l’expert
Le capteur de importateur à ultrasons RadioLink SUI04 SU04 est un module ultrasonique de haute qualité, idéal pour les drones. Il offre une précision de détection de 0.4cm, ce qui permet de capturer même les plus petits obstacles avec précision. De plus, son angle de faisceau de 60 degrés permet un évitement d’obstacles complet sans zone aveugle.
FAQ
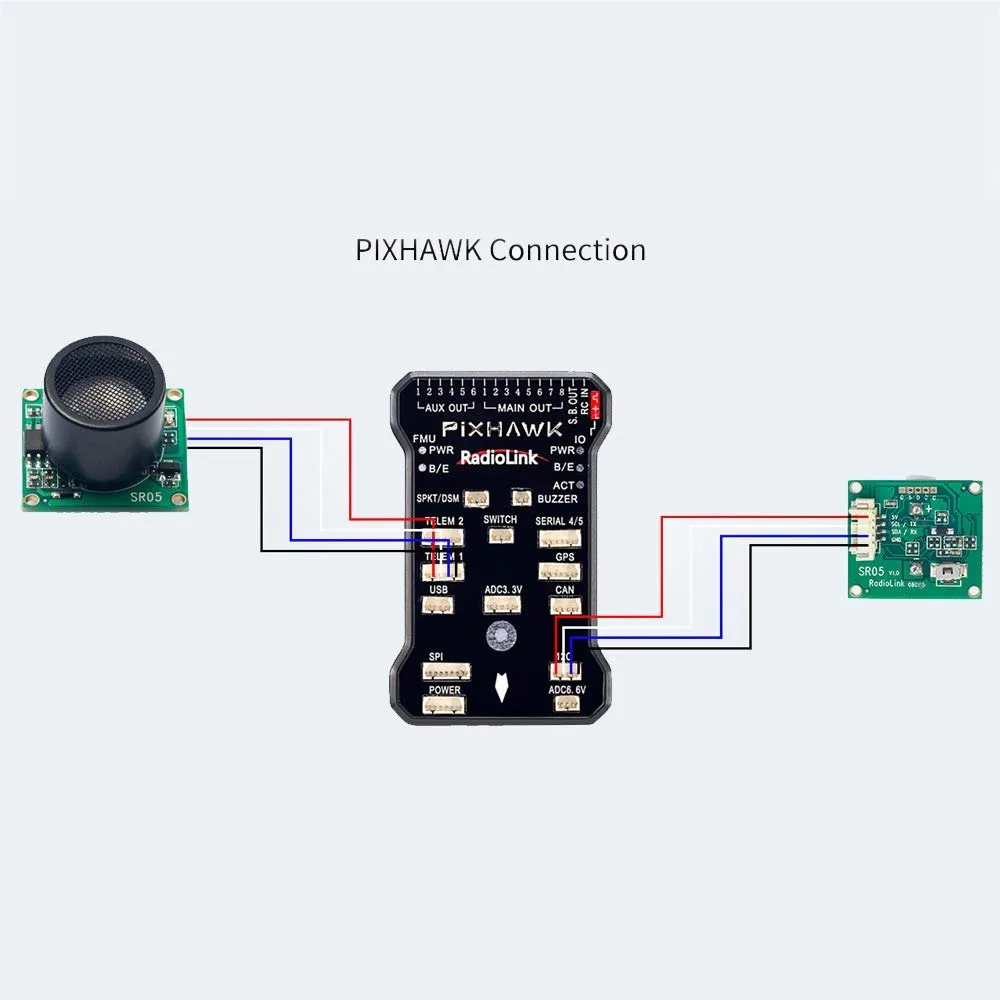
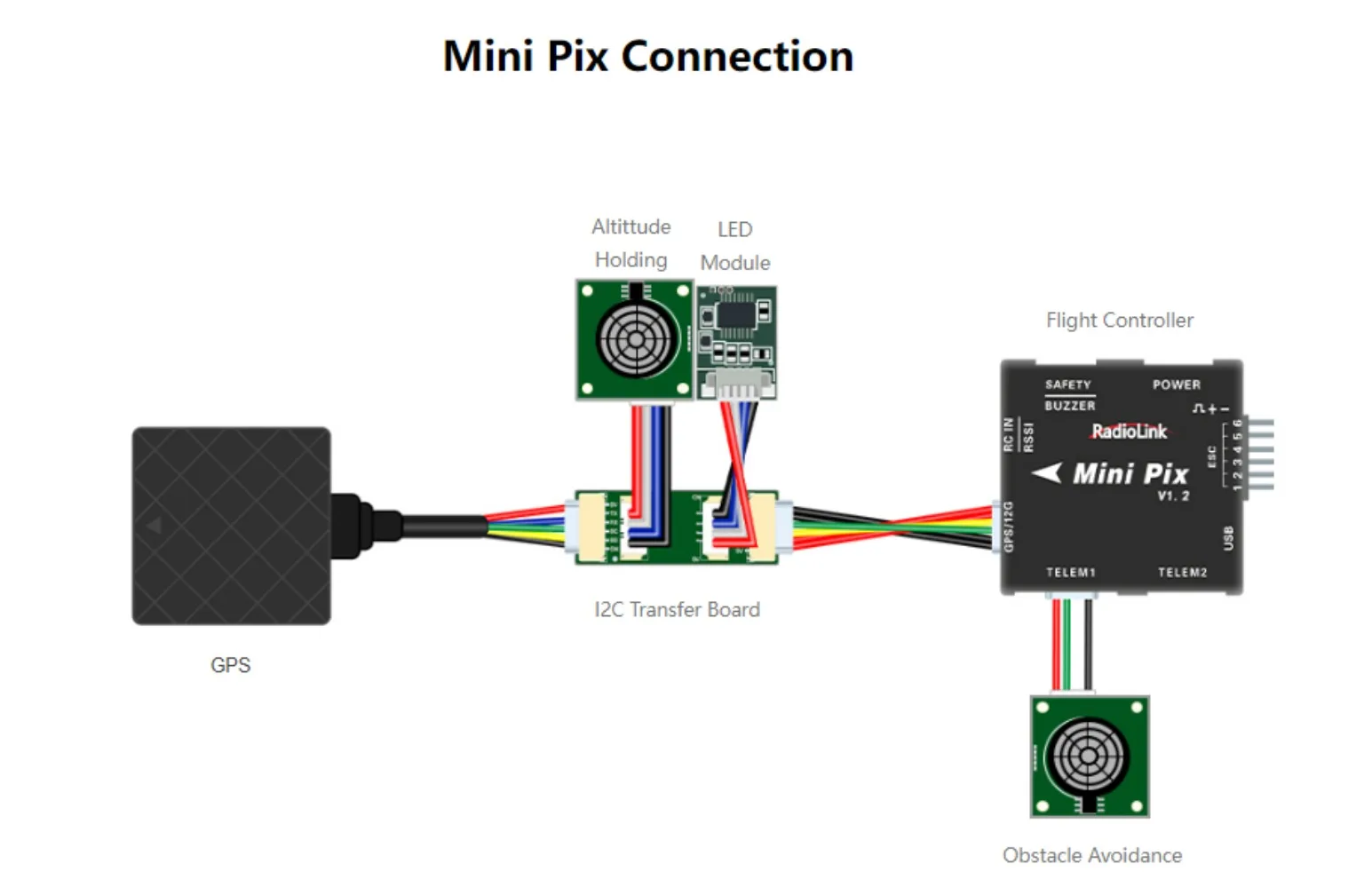
Q: Comment se connecter au PIXHAWK ?
R: Utilisez le fil 6 broches pour connecter l’insert du capteur à ultrasons SUI04 au port TELEM1 ou TELEM2 de PIXHAWK.
Q: Quelles versions de firmware sont compatibles avec la fonction d’évitement automatique des obstacles ?
R: Le firmware de PIXHAWK doit être version 3.5 ou version ultérieure pour utiliser cette fonction.
Q: À quelle distance le contrôleur de vol peut-il détecter les obstacles ?
R: Le contrôleur de vol ne peut pas identifier la distance de détection lorsque le capteur est loin de l’obstacle de plus de 450cm.
Q: Comment alimente-t-on PIXHAWK lorsque l’on utilise ce capteur ?
